Questionario di fisica
1) Quanto vale la proiezione ortogonale di un vettore sulla retta individuata da un versore:
 |
A
V
A´ = A * cosa
Volendo invece proiettare il vettore lungo un versore ortogonale a v la proiezione è A * sena.
2) A x ( B x C ) =
B ( A * C ) - C ( A * B )
3) ( A x B ) x C =
B ( A * C ) - A ( B * C )
4) Per quale motivo si utilizzano i vettori in fisica:
I vettori consentono di descrivere di descrivere dei fenomeni fisici on solo mediante una dimensione numerica ma anche con una direzione ed un verso, inoltre le relazioni vettoriali sono indipendenti dal particolare sistema di coordinate scelto, e quindi lo sono anche le leggi fisiche espresse vettorialmente.
5) Quanti modi vi sono per descrivere la posizione di un punto nello spazio:
a) ricavandone le coordinate quali proiezioni sui vettori della base ortonormale
b) Se il punto è vincolato a rimanere su un piano, si possono anche utilizzare le coordinate polari.
c) Se il punto è vincolato a rimanere su di una curva si può utilizzare la ascissa curvilinea ossia la distanza orientata rispetto ad un punto della curva preso come origine.
6) Cosa è la traiettoria di un punto:
È il luogo geometrico delle posizioni occupate dal punto al variare del tempo.
7) Cosa è la legge oraria associata al moto di un punto:
È la funzione che lega il tempo alla posizione del punto sulla traiettoria.
8) Definire il n° di gradi di libertà di un moto:
È il n° di coordinate indipendenti che individuano la posizione del punto p. Pertanto ad esempio se un punto dello spazio è vincolato ad appartenere ad un piano il n° delle coordinate necessarie per descriverne univocamente la traiettoria è 2 e pertanto anche il n° di gradi di libertà è 2.
9) Definire il vettore spostamento Dr:
Si tratta del vettore che congiunge la posizione al tempo t alla posizione al tempo (t + Dt).
![]()
10) Definire il vettore velocità lineare media vm :
Si tratta del rapporto tra il vettore spostamento e l´intervallo nel quale esso è calcolato.
![]()
11) Definire il vettore velocità lineare istantanea v(t) :
È il limite per Dt ® 0 del vettore velocità lineare media .
![]()
Dato che per un intervallo infinitesimo si può confondere il vettore spostamento con la arco di curva segue che si tratta di un vettore avente direzione sempre tangente alla traiettoria alla curva nel punto occupato all´istante t ed avente modulo coincidente con la derivata temporale della ascissa curvilinea.
12) Descrivere il vettore accelerazione lineare media am :
Si tratta del rapporto tra il vettore variazione di velocità nell´intervallo di tempo Dt e l´intervallo nel quale esso è calcolato.
![]()
13) Definire il vettore accelerazione lineare istantanea a(t) :
È il limite per Dt ® 0 del vettore accelerazione lineare media .
![]()
La direzione di questo vettore è individuata quale somma di una componente normale e di una componente tangenziale:
Accelerazione tangenziale ![]() il suo modulo vale
il suo modulo vale ![]() ed è diretta tangenzialmente alla curva.
ed è diretta tangenzialmente alla curva.
Per un moto circolare uniforme essa è nulla.
Accelerazione normale ![]() il suo modulo vale
il suo modulo vale ![]() ed è diretta verso il centro del cerchio osculatore avente raggio r ossia il centro della curva, viene pertanto chiamata accelerazione centripeta.
ed è diretta verso il centro del cerchio osculatore avente raggio r ossia il centro della curva, viene pertanto chiamata accelerazione centripeta.
14) Quando un moto è detto centrale:
Quando si svolge su di un piano e la accelerazione tangenziale è nulla.
15) Cosa è e quando è definita la velocità areolare:
È una velocità definita unicamente per i moti centrali e quindi piani, essa si identifica in un vettore ortogonale al piano sul quale avviene il moto e passante per il centro del moto![]() esso esprime la rapidità con cui la area elementare viene spazzata nel tempo infinitesimo.
esso esprime la rapidità con cui la area elementare viene spazzata nel tempo infinitesimo.
16) Descrivere il moto rettilineo uniforme:
Si tratta di un moto che avviene a velocità lineare costante e pertanto con accelerazione nulla.
17) Descrivere il moto rettilineo uniformemente accelerato:
Si tratta di un moto che avviene ad accelerazione lineare costante avente la sola componente tangenziale.
18) Definire un grave:
Si tratta di un qualsiasi corpo che si muove lungo la verticale verso il centro della terra con accelerazione costante dovuta alla interazione del corpo con la Terra, g = 9.8 m/s2.
19) Descrivere il moto armonico:
Si tratta di un moto periodico che avviene lungo una sola dimensione secondo una legge oraria armonica (sena o cosa).
La sua equazione differenziale è ![]() mentre le sue leggi orarie sono:
mentre le sue leggi orarie sono:
![]()
![]()
![]()
infine il periodo ![]() .
.
20) Descrivere il vettore spostamento angolare elementare dq:
È un vettore ortogonale al piano sul quale avviene la rotazione ed il cui modulo è pari all´entità della angolo spazzato dal raggio vettore nell´unità di tempo.
21) Descrivere il vettore velocità angolare w :
È un vettore con la stessa direzione e verso di dq e modulo pari alla variazione nel tempo di dq ![]() .
.
22) Descrivere il moto circolare uniforme:
Si tratta di un moto che avviene a velocità lineare costante ![]()
![]() il che implica che w sia costante vettorialmente la sua accelerazione è puramente normale e vale
il che implica che w sia costante vettorialmente la sua accelerazione è puramente normale e vale ![]() . Questo moto può anche pensarsi come composizione di 2 moti armonici ortogonali e sfasati di 90° .
. Questo moto può anche pensarsi come composizione di 2 moti armonici ortogonali e sfasati di 90° .
23) Descrivere il moto circolare non uniforme:
Si tratta di un moto che avviene a velocità lineare non costante ![]()
![]() il che implica che w non sia costante vettorialmente la sua accelerazione presenta sia componente normale che componente tangenziale
il che implica che w non sia costante vettorialmente la sua accelerazione presenta sia componente normale che componente tangenziale ![]() .
.
24) Definire la derivata di un versore ruotante secondo le formule di Poisson : ![]()
Tale risultato serve principalmente nei moti relativi per effettuare le derivate del sistema di riferimento rototraslante.
25) Enunciare e descrivere il valore della velocità assoluta riferita al sistema di riferimento in movimento :
![]() dove
dove
![]() è la velocità del punto materiale P misurata dall´osservatore mobile.
è la velocità del punto materiale P misurata dall´osservatore mobile.
![]() rappresenta la velocità di trascinamento ossia la velocità che compete ad un punto del sistema rotante misurata dall´osservatore fisso.
rappresenta la velocità di trascinamento ossia la velocità che compete ad un punto del sistema rotante misurata dall´osservatore fisso.
26) Enunciare e descrivere il valore della accelerazione assoluta riferita al sistema di riferimento in movimento :
![]() dove
dove
![]() è la accelerazione del punto materiale P misurata dall´osservatore mobile.
è la accelerazione del punto materiale P misurata dall´osservatore mobile.
![]() rappresenta la accelerazione di trascinamento ossia la accelerazione che compete ad un punto del sistema rotante misurata dall´osservatore fisso avente i seguenti significati:
rappresenta la accelerazione di trascinamento ossia la accelerazione che compete ad un punto del sistema rotante misurata dall´osservatore fisso avente i seguenti significati:
![]() è la accelerazione relativa alla traslazione della origine.
è la accelerazione relativa alla traslazione della origine.
![]() è la accelerazione tangenziale che compete ad un punto del sistema rotante misurata dall´osservatore fisso.
è la accelerazione tangenziale che compete ad un punto del sistema rotante misurata dall´osservatore fisso.
![]() è la accelerazione normale che compete ad un punto del sistema rotante misurata dall´osservatore fisso.
è la accelerazione normale che compete ad un punto del sistema rotante misurata dall´osservatore fisso.
![]() è la accelerazione di Coriolis che per l´osservatore relativo risulta solo deviatrice in quanto ^ a vr .
è la accelerazione di Coriolis che per l´osservatore relativo risulta solo deviatrice in quanto ^ a vr .
27) Descrivere una caratteristica generale dei vettori associati alle grandezze angolari :
Sono vettori non applicati i quali se il moto è piano risultano ortogonali al piano su quale si svolge il moto.
Dinamica del punto
28) Che cosa è l´inerzia :
È la tendenza di un corpo a non abbandonare il suo stato di quiete o di moto rettilineo uniforme.
29) Quando un sistema di riferimento è inerziale o galileiano:
Quando non fornisce alcuna azione ad un corpo ad esso solidale.
30) Enunciare il 1° principio della dinamica o d´inerzia :
In un sistema di riferimento inerziale un corpo, non sottoposto ad alcuna azione, continua nel suo stato di quiete o di moto rettilineo uniforme
31) Cosa è una forza:
È la causa fisica che modifica lo stato di quiete di un corpo.
32) Cosa è la massa inerziale:
È la misura della inerzia di un corpo a variare la sua velocità vettoriale sotto la azione di una forza costante. Essa varia con la velocità unicamente per velocità prossime a quelle della luce.
33) Che cosa è la quantità di moto:
Indica la differenza tra l´essere investito da una mosca o da un autocarro che vanno entrambe a 10 Km/h.
![]()
34) Enunciare il 2° principio della dinamica :
In un sistema di riferimento inerziale la forza applicata ad un corpo è pari alla variazione infinitesima nel tempo della sua quantità di moto ![]() coincide con la
coincide con la ![]() unicamente per velocità prossime a quelle della luce
unicamente per velocità prossime a quelle della luce
35) Che cosa è l´impulso di una forza e quanto vale:
![]() è cioè pari alla variazione della quantità di moto in 2 istanti considerati.
è cioè pari alla variazione della quantità di moto in 2 istanti considerati.
36) Enunciare il 3° principio della dinamica:
È il principio della azione e reazione secondo il quale se due corpi A e B interagiscono allora ![]()
Hanno cioè stesso modulo e direzione ma verso opposto.
37) Definire e valutare la forza peso:
È una forza di attrazione che la terra esercita su un qualsiasi corpo dotato di massa è costante P = mg e diretta verso il centro del pianeta, vale 9.81N.
38) Definire e valutare la forza elastica:
Esprime la capacità che hanno alcuni corpi come la molla di rispondere alla forza ad essa applicata con una deformazione, quando non agisce più la forza esterna allora il corpo tende a ritornare nelle condizioni iniziali estrinsecando una forza proporzionale alla sua deformazione ![]() dove k è la costante elastica della molla misurata in N/m .
dove k è la costante elastica della molla misurata in N/m .
39) Quanto vale la costante elastica di 2 molle in serie:
![]() proprio come 2 resistenze in parallelo.
proprio come 2 resistenze in parallelo.
40) Quanto vale la costante elastica di 2 molle in parallelo:
![]() proprio come 2 resistenze in serie.
proprio come 2 resistenze in serie.
41) Che cosa è la forza di resistenza alla avanzamento:
È una forza il fluido nel quale il corpo si muove oppone al moto stesso, essa è funzione delle caratteristiche geometriche del corpo in movimento ![]() dove :
dove :
a = fattore di forma
r = massa volumica del fluido ![]()
S = area della proiezione del corpo su di un piano ortogonale a v
f(v) = la resistenza è quindi anche funzione della velocità.
42) Cosa distingue la resistenza alla avanzamento viscosa dalla resistenza alla avanzamento idraulica:
La viscosa vale per velocità inferiori ai 2 m/s e vale ![]() mentre la 2ª è relativa a velocità comprese tra i 2m/s ed i 200m/s e vale
mentre la 2ª è relativa a velocità comprese tra i 2m/s ed i 200m/s e vale ![]() dove b in entrambe i casi è il coefficiente di smorzamento. In entrambe i casi si nota che il corpo nel suo moto non può superare una determinata velocità imposta appunto da questa resistenza alla avanzamento, tale valore è detto velocità limite e si considera acquisita dopo un tempo pari a 3 volte la costante di tempo, un valore che indica in quanto tempo la velocità si è ridotta ad 1/e del valore iniziale.
dove b in entrambe i casi è il coefficiente di smorzamento. In entrambe i casi si nota che il corpo nel suo moto non può superare una determinata velocità imposta appunto da questa resistenza alla avanzamento, tale valore è detto velocità limite e si considera acquisita dopo un tempo pari a 3 volte la costante di tempo, un valore che indica in quanto tempo la velocità si è ridotta ad 1/e del valore iniziale.
43) Definire una forza centrale isotropa:
Una forza è centrale se risulta sempre diretta verso un punto fisso detto centro, il suo modulo dipende quindi solo dalla posizione del punto in moto rispetto a questo centro ![]() . La stessa forza è poi detta isotropa nel caso che l´intensità della forza sia indipendente dalla direzione che il vettore ha rispetto ad un sistema di riferimento inerziale.
. La stessa forza è poi detta isotropa nel caso che l´intensità della forza sia indipendente dalla direzione che il vettore ha rispetto ad un sistema di riferimento inerziale.
44) Cosa è un vincolo onolomo:
Un vincolo è una limitazione alla libertà di muoversi di un corpo, il vincolo è onolomo quando agisce sulla posizione mentre è anolonomo quando agisce sulla velocità del corpo.
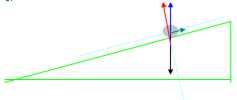
45) Descrivere la forza di reazione:
Si tratta della caratteristica di impenetrabilità dei solidi che consiste in una forza che si oppone alla forza peso del corpo impedendo allo stesso di raggiungere il centro della terra. Tale forza a seconda della inclinazione del piano può presentare 2 componenti , una ortogonale al piano (reazione normale RN ) ed una parallela al piano diretta in modo da opporsi al moto (Forza d´attrito).
46) Descrivere la reazione normale:
Si tratta della componente secondo la normale al piano della forza di reazione.
47) Descrivere la attrito:
Si tratta della componente parallela al piano della forza di reazione. Essa è funzione delle caratteristiche atomiche dei corpi a contatto che viene espressa tramite i seguenti 2 coefficienti :
ms = coefficiente di attrito statico, esso indica che il corpo inizierà a muoversi solo se verrà impressa al corpo una forza RA = RN * ms.
md = coefficiente di attrito dinamico, esso indica quale forza è necessario continuare a fornire una volta che il corpo è in movimento per mantenerlo in moto rettilineo uniforme RA´ = RN * md. Si osserva che md è < ms .
48) Come definire un filo:
È un sistema deformabile inestendibile capace di esplicare una reazione vincolare detta tensione unicamente lungo la sua lunghezza.
49) Descrivere cosa è e che moto descrive un oscillatore smorzato:
Si tratta di un oscillatore unidimensionale sottoposto ad una resistenza d´avanzamento ad esempio di tipo viscoso. il moto si ottiene dalla ![]() le soluzioni sono diverse a seconda del coefficiente di smorzamento b relativo alla forza viscosa.
le soluzioni sono diverse a seconda del coefficiente di smorzamento b relativo alla forza viscosa.
se b = 0 Þ oscillatore armonico libero
se b è piccolo Þ moto oscillatorio non periodico smorzato.
se b = bcritico Þ è un moto smorzato con ritorno alla posizione di equilibrio nel minor tempo possibile.
se b è grande Þ è un moto smorzato con ritorno alla posizione di equilibrio senza alcuna oscillazione.
50) Descrivere cosa è e che moto descrive un oscillatore forzato:
Si tratta di un oscillatore unidimensionale sottoposto ad una resistenza d´avanzamento ad esempio di tipo viscoso al quale è inoltre applicata una forza variabile nel tempo in modo periodico. Il moto si ottiene dalla ![]() le cui soluzioni sono 2, una è uguale a quella della oscillatore smorzato e determina il moto transitorio della oscillatore la cui durata è funzione di b. La 2ª soluzione identifica la frequenza di risonanza in corrispondenza della quale l´oscillatore oscilla con la maggiore energia anche in relazione al rapporto b/ bcritico questa seconda soluzione determina il moto della oscillatore a regime.
le cui soluzioni sono 2, una è uguale a quella della oscillatore smorzato e determina il moto transitorio della oscillatore la cui durata è funzione di b. La 2ª soluzione identifica la frequenza di risonanza in corrispondenza della quale l´oscillatore oscilla con la maggiore energia anche in relazione al rapporto b/ bcritico questa seconda soluzione determina il moto della oscillatore a regime.
51) Cosa è il momento di una forza F rispetto ad un polo O :
È un vettore ![]() ortogonale al piano contenente la forza ed indicante la capacità che essa ha di effettuare una rotazione, si pensi cioè a spingere un pesante portone vicino alla asse, oppure il più lontano possibile dalla asse di rotazione, si noterà che lo spostamento provocato a parità di forza è maggiore nel 2° caso.
ortogonale al piano contenente la forza ed indicante la capacità che essa ha di effettuare una rotazione, si pensi cioè a spingere un pesante portone vicino alla asse, oppure il più lontano possibile dalla asse di rotazione, si noterà che lo spostamento provocato a parità di forza è maggiore nel 2° caso. ![]() assume per le rotazioni lo stesso significato che assumono le forze per le traslazioni. È ad esempio chiaro che se la forza è parallela al vettore r che la congiunge al polo essa non è in grado di esplicare alcuna rotazione.
assume per le rotazioni lo stesso significato che assumono le forze per le traslazioni. È ad esempio chiaro che se la forza è parallela al vettore r che la congiunge al polo essa non è in grado di esplicare alcuna rotazione.
52) Cosa è il momento assiale di una forza:
È la proiezione del vettore ![]() su un asse passante per il polo.
su un asse passante per il polo.
53) Cosa è il momento angolare rispetto ad un polo O :
È un vettore ![]() ortogonale al piano nel quale si svolge il moto ed indicante il fatto che m compie una rotazione rispetto al polo.
ortogonale al piano nel quale si svolge il moto ed indicante il fatto che m compie una rotazione rispetto al polo. ![]() assume per le rotazioni lo stesso significato che assumono la quantità di moto per le traslazioni. È ad esempio chiaro che se la velocità del punto è parallela al vettore r che lo congiunge al polo non vi è alcuna rotazione.
assume per le rotazioni lo stesso significato che assumono la quantità di moto per le traslazioni. È ad esempio chiaro che se la velocità del punto è parallela al vettore r che lo congiunge al polo non vi è alcuna rotazione.
54) Quale è la relazione che lega il momento della forza al momento angolare:
![]() essa è per le rotazioni ciò che la
essa è per le rotazioni ciò che la ![]() è per le traslazioni.
è per le traslazioni.
55) Che cosa è l´impulso di un momento e quanto vale:
![]() è cioè pari alla variazione del momento della quantità di moto in 2 istanti considerati.
è cioè pari alla variazione del momento della quantità di moto in 2 istanti considerati.
56) Descrivere il moto di un punto in un campo di forze centrali:
Il momento ![]() è nullo pertanto il moto avviene con momento angolare costante e viene pertanto descritto un moto piano con velocità areolare costante. Nel caso ad esempio che la forza centrale sia la forza elastica allora il moto è generato dalla composizione di 2 moti armonici e la traiettoria risultante è in funzione della relazione di fase una delle figure di Lissajous.
è nullo pertanto il moto avviene con momento angolare costante e viene pertanto descritto un moto piano con velocità areolare costante. Nel caso ad esempio che la forza centrale sia la forza elastica allora il moto è generato dalla composizione di 2 moti armonici e la traiettoria risultante è in funzione della relazione di fase una delle figure di Lissajous.
57) Cosa è il lavoro elementare di una forza:
Si tratta di una grandezza ![]() che risulta essere funzione della traiettoria. È una grandezza necessaria a descrivere il concetto di energia infatti con uno stupido esempio più si mangia e più si fa un buon lavoro ed associando idealmente il cibo alla energia ed il lavoro al lavoro segue che quest´ultimo è l´esplicazione della energia. Storicamente i 2 concetti nascono per poter paragonare prestazioni di macchine.
che risulta essere funzione della traiettoria. È una grandezza necessaria a descrivere il concetto di energia infatti con uno stupido esempio più si mangia e più si fa un buon lavoro ed associando idealmente il cibo alla energia ed il lavoro al lavoro segue che quest´ultimo è l´esplicazione della energia. Storicamente i 2 concetti nascono per poter paragonare prestazioni di macchine.